В 2015 году выпускники кафедры «Системная инженерия» (теперь «Информационные и управляющие системы») по специальности «Компьютеризированные и робототехнические системы» Алексей Лещенко, Игорь Рубаник и Александр Наумов под руководством к.т.н., доцента Лехциера О.Л. защитили комплексную магистерскую работу на тему: «Разработка и исследование механической мобильной системы с микропроцессорным управлением».
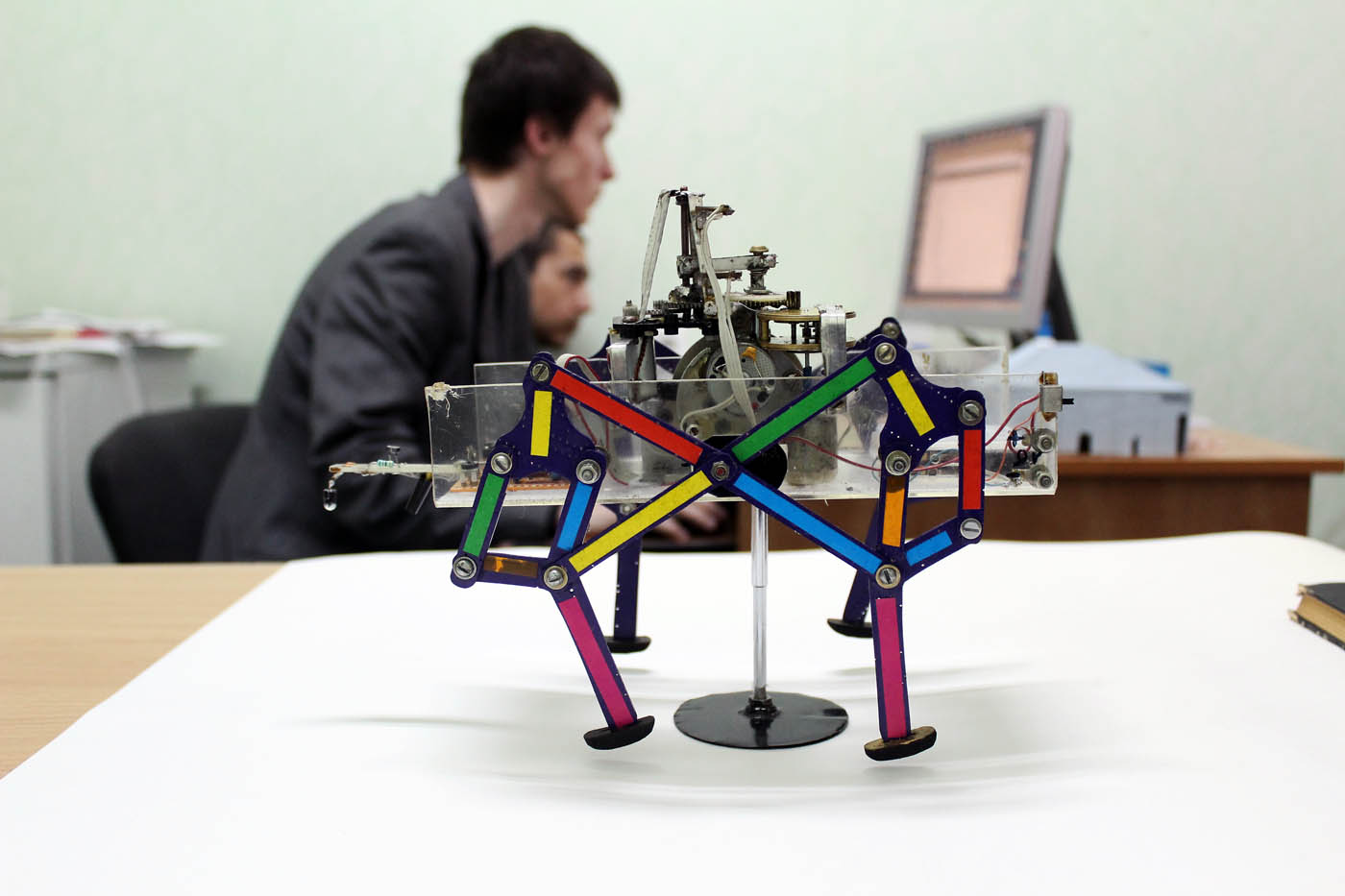



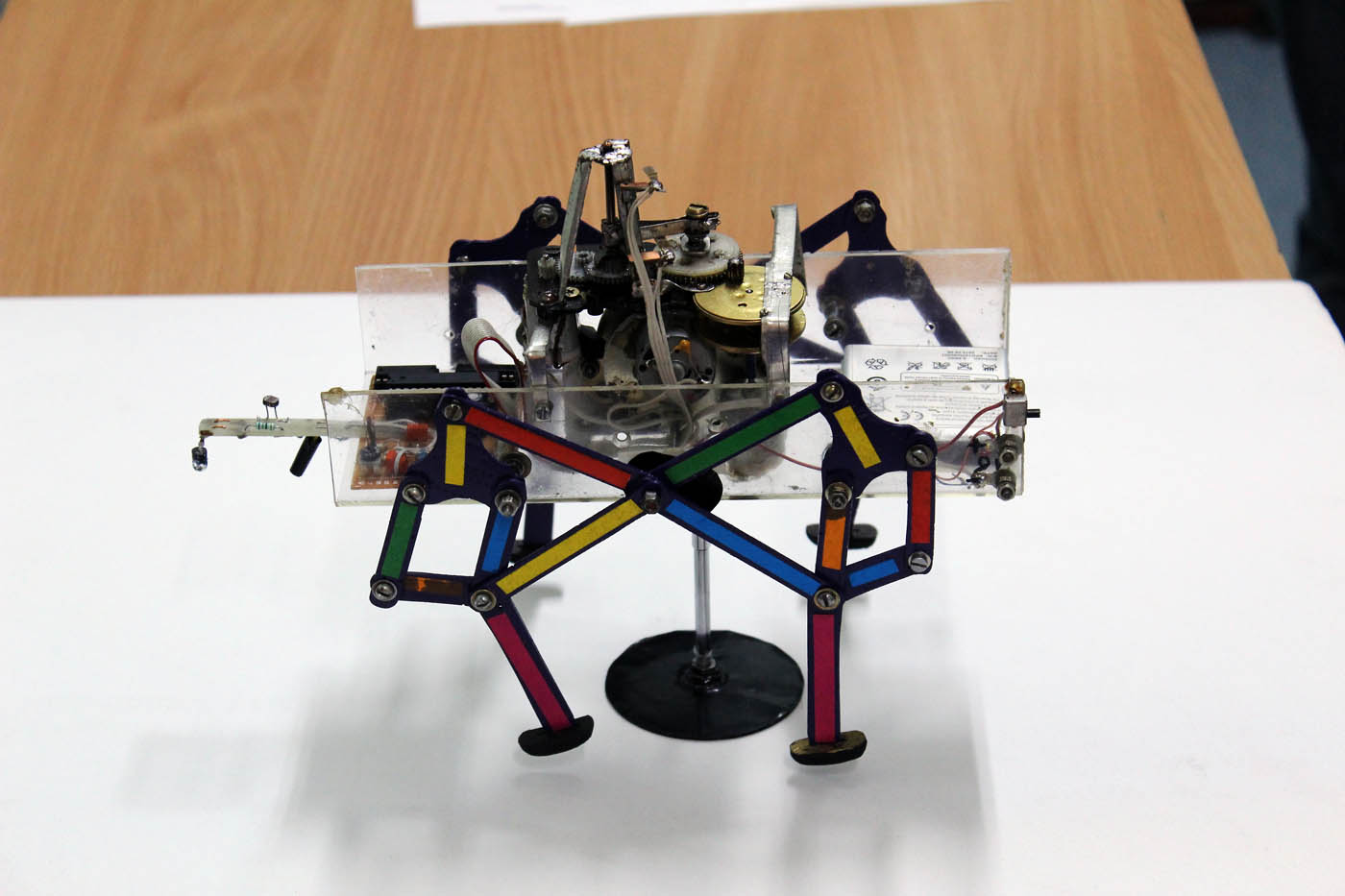


Фактически за названием скрывается разработка шагающего устройства с микропроцессорным управлением, оснащенного техническим зрением и оригинальным механизмом поворота на ограниченной площади. Шагающие машины могут применяться как средство решения проблемы передвижения по бездорожью или местности со сложным рельефом. Колесо лишь частично решает проблему передвижения, т.к. для его эффективного использования нужна ровная, непрерывная опорная поверхность. Шагающее устройство в состоянии само выбирать точки контакта ноги с поверхностью и учитывать ее неровности.
Вашему вниманию предлагается часть материалов, использованная авторами в ходе разработки своей конструкции, которая была признана победителем на конкурсе «Кадровый резерв», проходившем в 2015 году среди студентов высших учебных заведений Луганска.
Актуальность: Шагающие машины могут применяться как средство решения проблемы передвижения по бездорожью или местности со сложным рельефом. Колесо лишь частично решает проблему передвижения, т.к. для его эффективного использования нужна ровная опорная поверхность, притом непрерывная. Шагающее устройство в состоянии само выбирать точки контакта ноги с поверхностью и учитывать ее неровности.

Разработанная мобильная система мажет применяться как платформа многоцелевого назначения, имеющая как собственную микропроцессорную систему управления обеспечивающую решение задачи выбора пути к заданной цели, так и возможность удаленного управления оператором.
В работе применен оригинальный способ разворота механической мобильной системы с помощью выдвижного поворотного механизма.

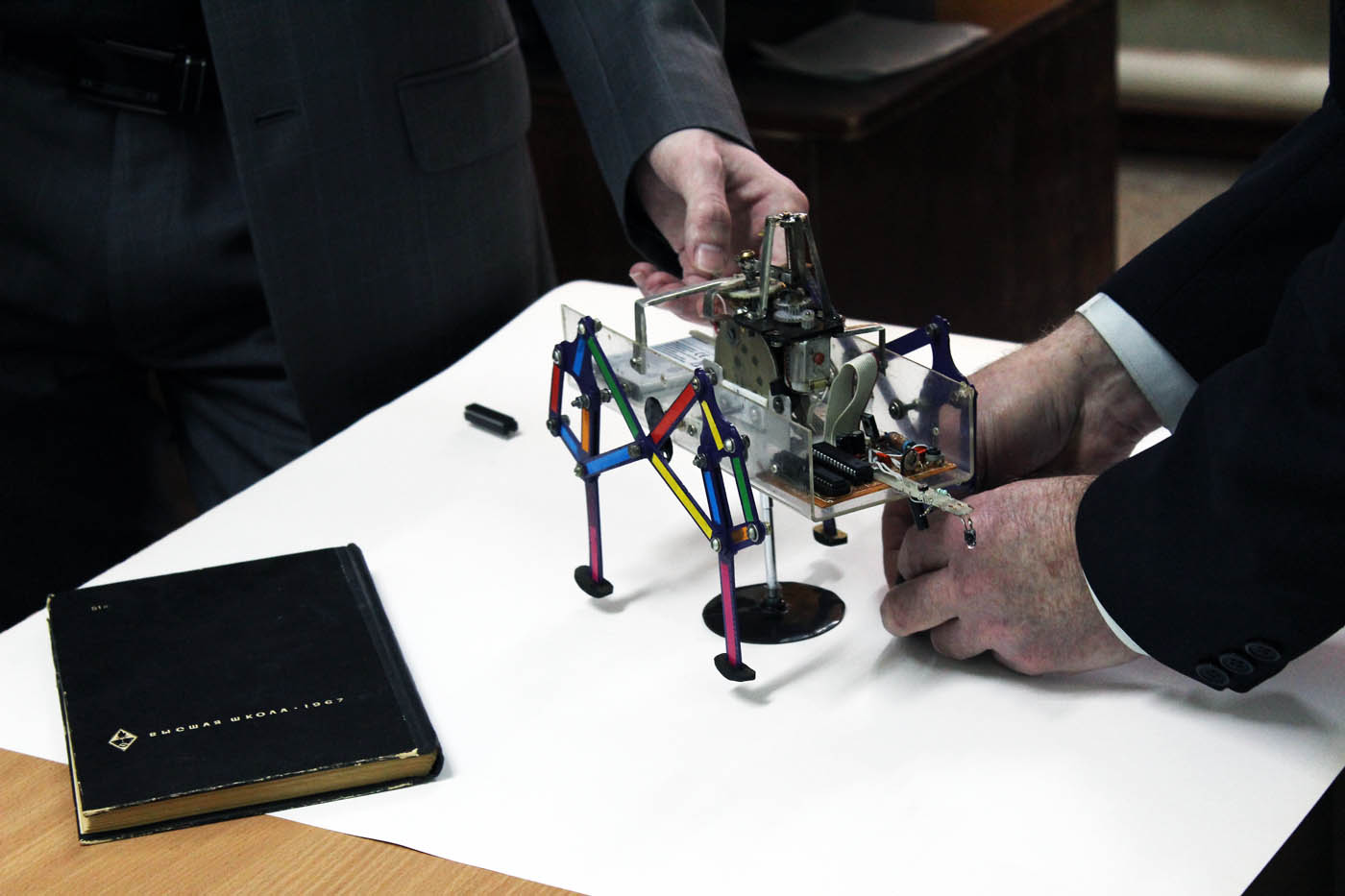
Результатом кропотливого труда стало устройство, испытание и наладка которого предлагается Вашему вниманию на следующем видео. Обращаем также Ваше внимание на тот факт, что в устройстве отсутствуют какие-либо покупные детали из всевозможных «конструкторов» (кроме микропроцессора и электронных комплектующих компонентов) или сервоприводы с заранее определенным функциональным назначением. Этот факт придает работе несомненное достоинство при сравнении с собранными из готовых модулей «игрушек» и подчеркивает умение авторов самостоятельно принимать оригинальные конструкторские решения.
Плейлист тестирования разработки
Доклад по магистерской работе Алексея Кожевникова
Помимо шагающих роботов ведутся изыскания и в других направлениях робототехники. Ниже представлен доклад по магистерской работе Кожевникова Алексея, посвященной модернизации системы управления робота PUMA-560.
P.S.В результате удачно проведенной операции иностранным разведкам удалось завладеть секретами разработанного нашими студентами устройства. Творчески переработав полученный материал, специалисты компании Boston Dynamics усовершенствовали конструкцию и, чтобы скрыть первоисточник, модифицировали ее до неузнаваемости, в чем Вы можете убедиться, просмотрев следующий видеоролик =).